Arbeite an meinem nächsten Roboter Projekt
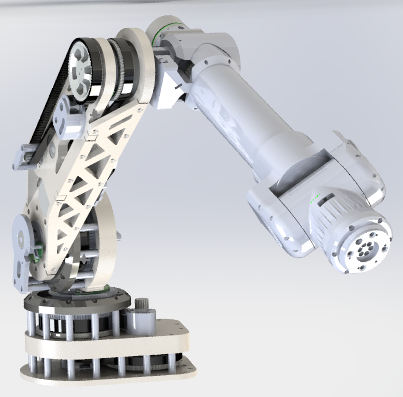
Mein Ziel ist es, mir mit jedem Projekt einen neuen Standard zu setzen. Ein halbes Jahr Arbeit am CAD ermöglichte die Erstellung von über 500 Teilen – die Hardware ist endlich fertig! Jetzt folgt der Zusammenbau
 |
 |
|---|
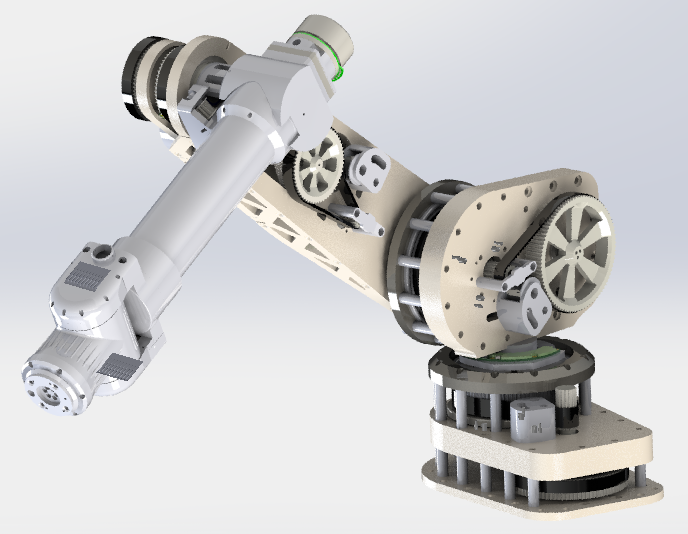
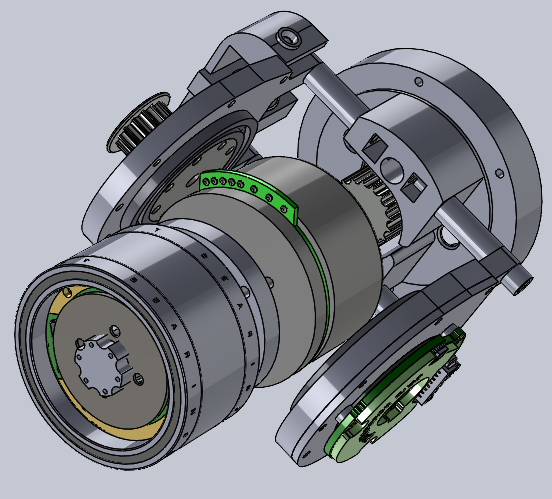
Die Robotergelenke (Reichweite: 0,6 m, Traglast: 3 kg) werden durch BLDC-Motoren servogesteuert und sind mit absoluten Encodern ausgestattet. Die ersten vier Achsen sind riemengetrieben (belt drive), während die Achsen 5 und 6 Wellengetriebe (wave gears/harmonic drives) nutzen (siehe Bild der 6. Achse).
 |
 |
|---|
Die gesamte Hardware-Kette wurde erfolgreich umgesetzt: Die ersten beiden Achsen entstanden mithilfe dieses Videos und wurden als CAD-Modelle nachgebildet. Mein besonderer Dank gilt dem Autor Adrian Prinz, der das Design aufgegriffen und dokumentiert hat – was mir als wertvolle Inspiration diente
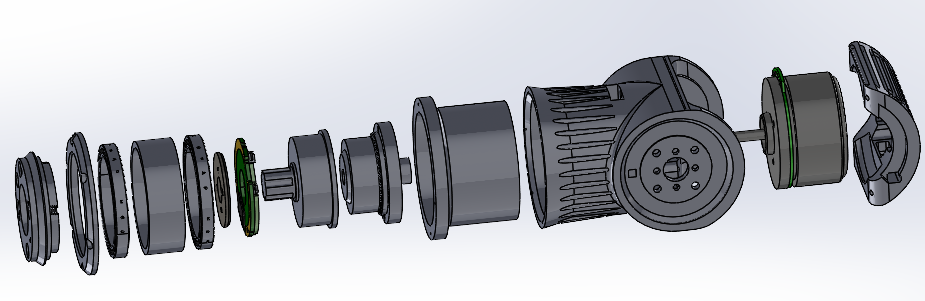
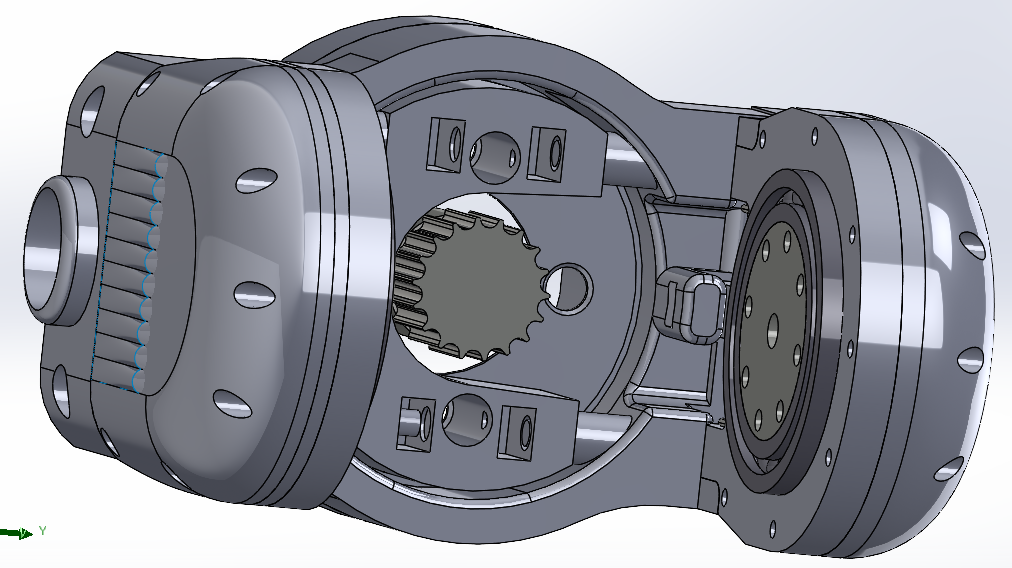
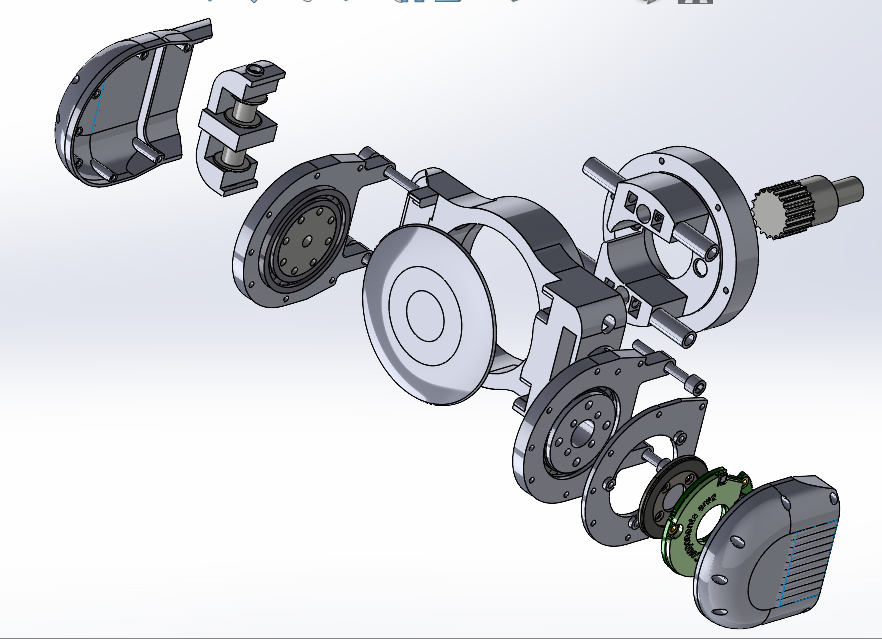
Hier sind ein paar Bilder meines Modells der 5. Achse: Rechts sieht man alle Innenteile in kaskadierter Darstellung, links den Zusammenbau:
 |
 |
|---|
Lessons Learned: Alles in einer einzigen Baugruppe zu zeichnen war keine gute Lösung, da die hohe Teileanzahl zu langen Ladezeiten führt. Wenn man Teile modelliert hat, sollte man sie jeweils in eine neue Baugruppe verschieben, die das 3D-Modell der jeweiligen Achse enthält. Anfangs kann auch Fusion 360 statt SolidWorks verwendet werden, da es eine modernere und grafisch übersichtlichere Anwendung ist